Autonomous Systems and Control Laboratory (ASCL)
 |
The Autonomous Systems and Control Laboratory (ASCL) in the Mechanical Engineering Department of The City College of New York develops methodologies for the analysis, design, and control of autonomous systems, with a particular emphasis on autonomous vehicles and robotic networks. Our fundamental and applied research on autonomous systems and controls aims to enable greater autonomy for explorations of land, sea, and sky. The lab focus is on a wide range of research efforts which include
The lab director is Dr. Bo Wang, Assistant Professor of Mechanical Engineering. Current projects deal with theoretical and experimental investigation of networked underactuated multi-vehicle systems and source seeking control design. |
Research
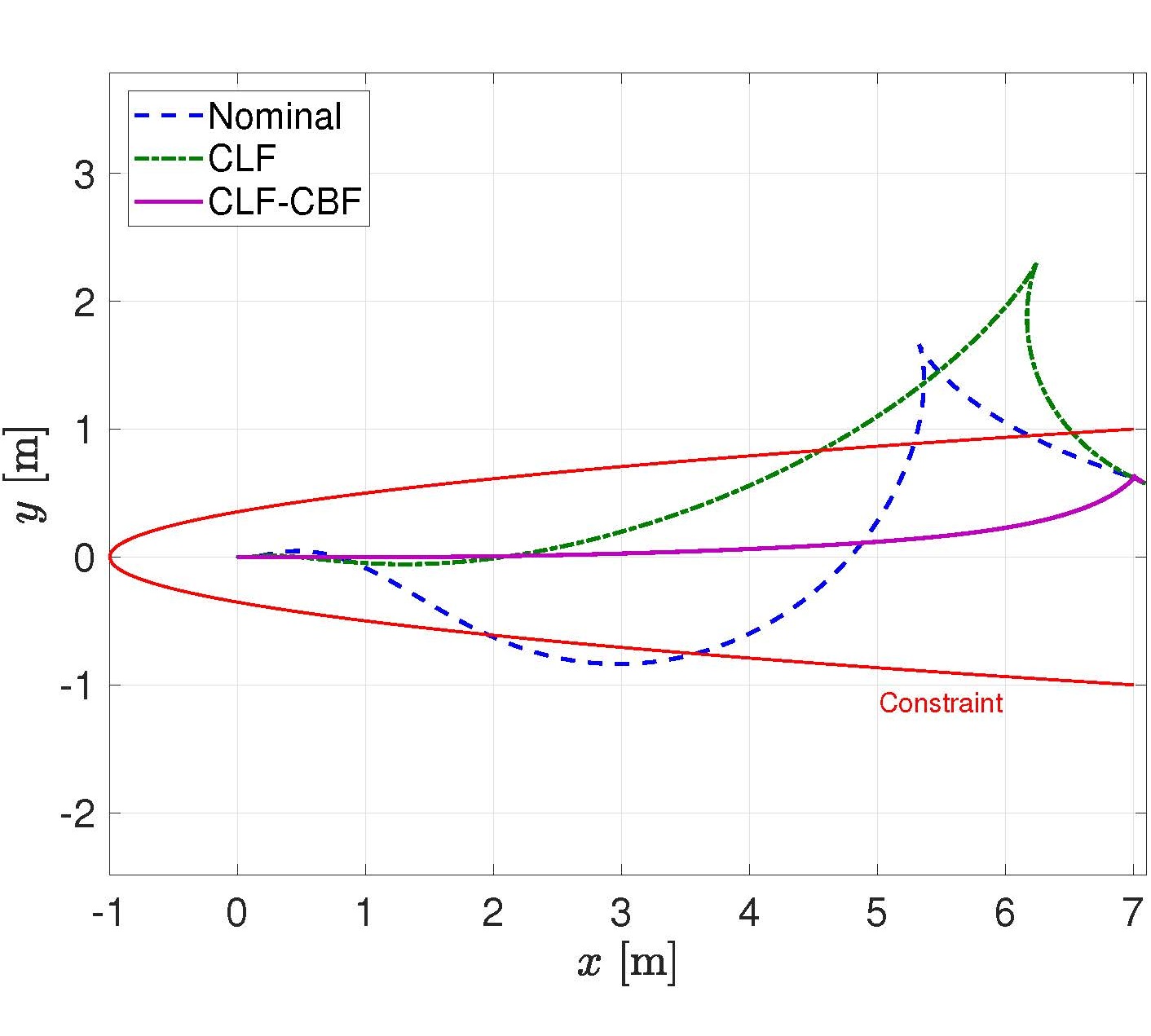 |
Safety-Critical Stabilization of Force-Controlled Nonholonomic Robots We present a safety-critical controller for the problem of stabilization for force-controlled nonholonomic mobile robots. The proposed control law is based on the constructions of control Lyapunov functions (CLFs) and control barrier functions (CBFs) for cascaded systems. To address nonholonomicity, we design the nominal controller that guarantees global asymptotic stability and local exponential stability for the closed-loop system in polar coordinates and construct a strict Lyapunov function valid on any compact sets. Furthermore, we present a procedure for constructing CBFs for cascaded systems, utilizing the CBF of the kinematic model through integrator backstepping. Quadratic programming is employed to combine CLFs and CBFs to integrate both stability and safety in the closed loop. The proposed control law is time-invariant, continuous along trajectories, and easy to implement. Our main results guarantee both safety and local asymptotic stability for the closed-loop system. Selected Publications:
|
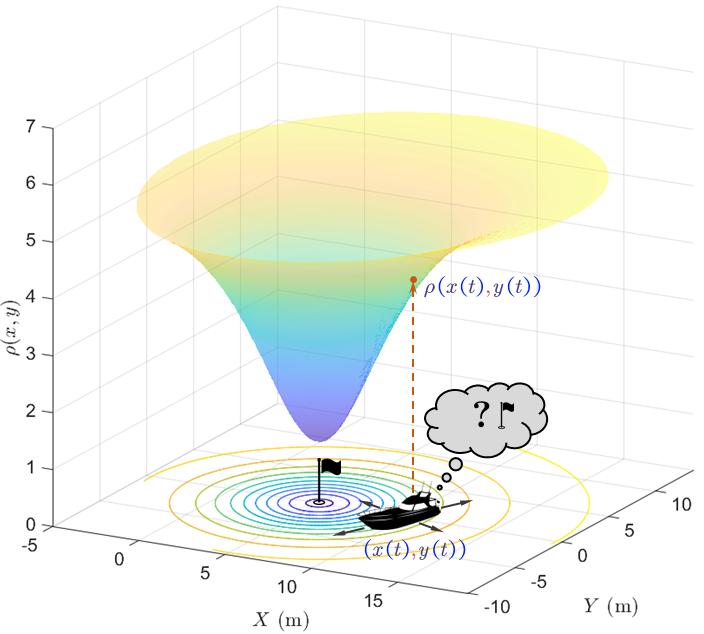 |
Source Seeking for Planar Underactuated Vehicles Autonomous vehicles that operate without GPS or INS benefit from source seeking capabilities. In this work, we develop novel source seeking strategies for generic force/torque-controlled planar underactuated vehicles. We provide a theoretical foundation for underactuated extremum seeking algorithms based on symmetric product approximations, averaging, passivity, and partial-state stability theory. The source seeking controller does not require any position or velocity measurements but only real-time measurements of the source signal at the current position. The semi-globally practically asymptotically stable is proven for the closed-loop source seeking systems. Potential application scenarios include distance-based localization, avalanche victim search, chemical/gas leakage location, etc. Selected Publications:
|
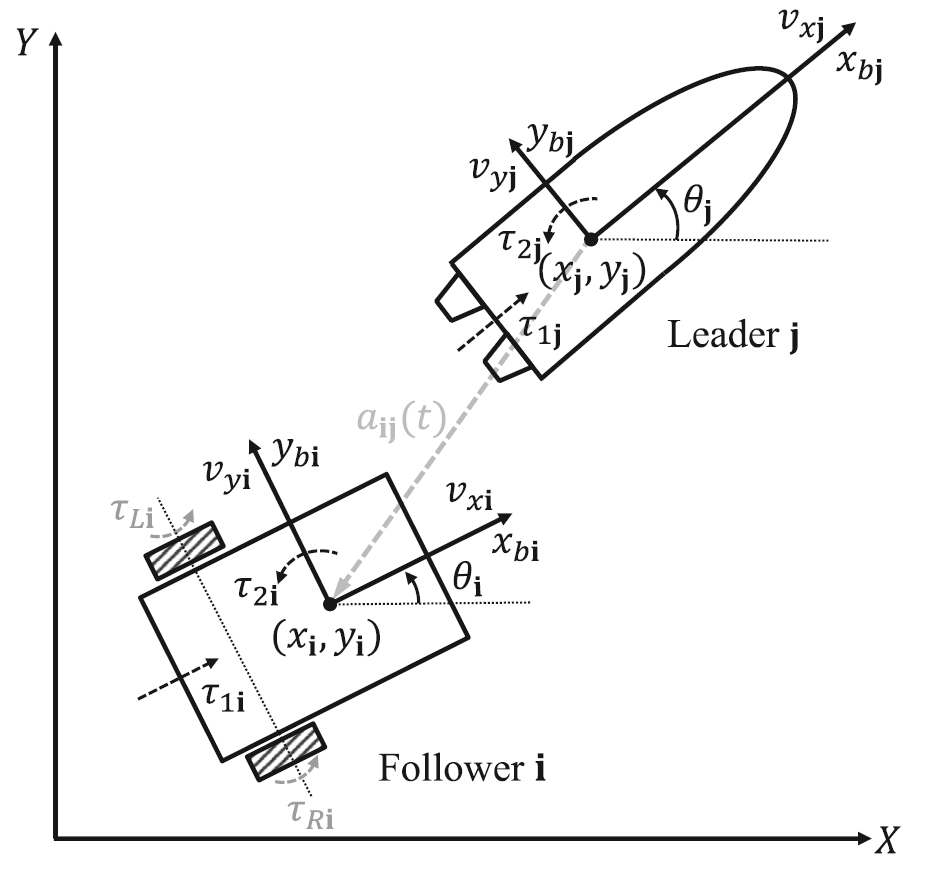 |
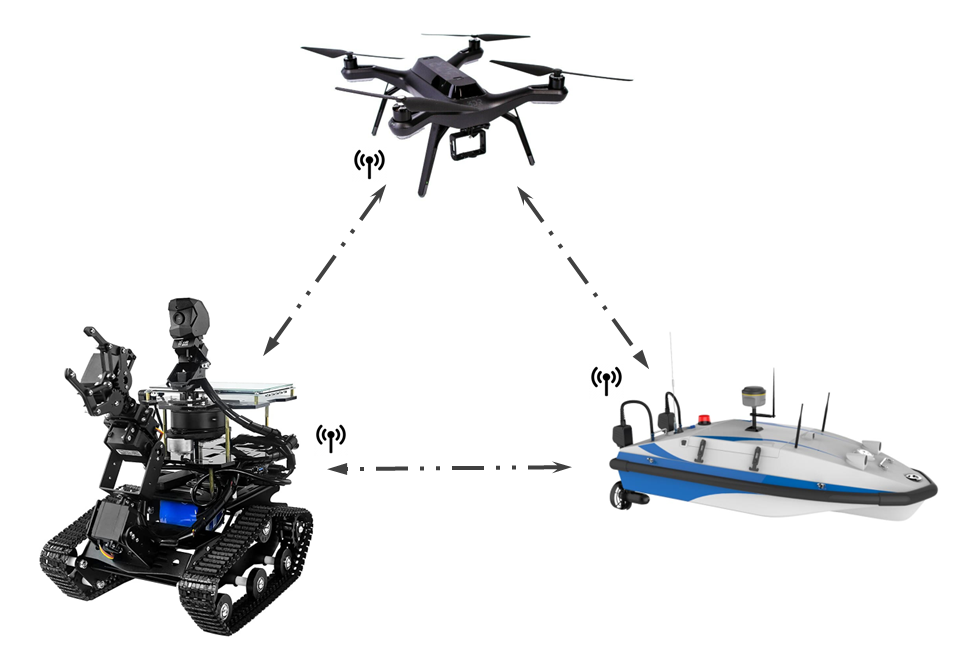
Formation Stabilization and Tracking Control of Planar Underactuated Vehicles The advantages of multi-vehicle systems over single vehicles include higher efficiency, robustness, and flexibility. This research is devoted to developing distributed control approaches that are applicable to heterogeneous underactuated multi-vehicle systems. We presente a distributed control framework to simultaneously address the formation stabilization and tracking control problem for heterogeneous planar underactuated vehicle networks without global position measurements. Potential applications include reconnaissance, mine clearance, and search and rescue missions. Selected Publications:
|
Collaborators
|
|
|
|
Location
 |
Autonomous Systems and Control Laboratory The City College of New York Department of Mechanical Engineering Marshak Science Building, Room 705 160 Convent Avenue, New York, NY 10031 |
Contact
Laboratory director
Dr. Bo Wang, Assistant Professor of Mechanical Engineering
Email: bwang1@ccny.cuny.edu
Office Phone: +1 (212) 650-5204